没有机器人,人将变为机器;有了机器人,人仍然是主人。工业4.0时代,智能制造席卷全球,你准备好了吗?
专题策划与制作:孟婷
当神经传感遇到集群机器人
慕雪 发表于2015-06-15 13:50:28
《超能陆战队》中除了人人都想拥有的暖男大白外,还有一项令人兴奋不已的技术值得我们关注,那就是小宏的求学发明——神经传感控制微型机器人,那么,它如今能够实现吗?“神经控制微型机器人”涉及两个核心技术:一是神经传感控制,二是集群机器人(Swarm Robotics)的运行。幸运的是,这两项技术都已问世,且听小编逐一道来。
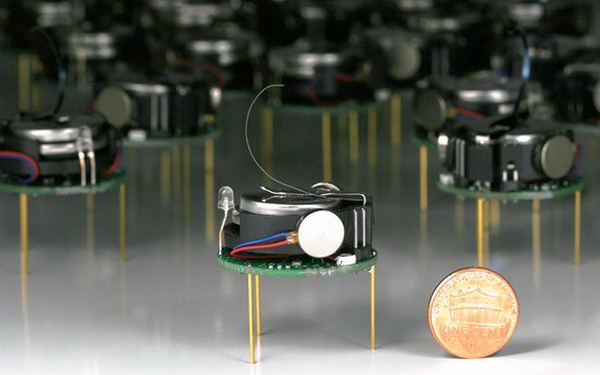 2014年末,在英国《自然》杂志评选出的2014年度十人里,来自哈佛的科学家Radhika Nagpal凭借集群机器人上榜,她的作品是1024只名叫Kilobot的微型机器人。Kilobot高3.3厘米,跟硬币差不多大小;其标配是一个红外传感器、一个震动式马达和一个小型微处理器。红外传感器是用来接收主控台的信息和机器人之间的沟通,当两个机器人间距不超过10厘米时,它们能彼此通过红外线进行交流。接受到邻近信息后,经过内植简单程序的微处理器分析,微型机器人能执行具体的命令,信息就这样一层一层传导开。具体执行时,震动式马达通过抬起“腿”而完成移动。在以上三个小部件的共同作用下,当主控台让小机器人排成“K”或者是五角星的形状之后,历时12个小时的默默分工合作,机器人们完成排列。除此以外,Kilobots还能够对错误进行修正。如果出现了交通堵塞、或者是有机器人偏离轨道,邻近的机器人都能够检测到问题, 进行自我修正。
2014年末,在英国《自然》杂志评选出的2014年度十人里,来自哈佛的科学家Radhika Nagpal凭借集群机器人上榜,她的作品是1024只名叫Kilobot的微型机器人。Kilobot高3.3厘米,跟硬币差不多大小;其标配是一个红外传感器、一个震动式马达和一个小型微处理器。红外传感器是用来接收主控台的信息和机器人之间的沟通,当两个机器人间距不超过10厘米时,它们能彼此通过红外线进行交流。接受到邻近信息后,经过内植简单程序的微处理器分析,微型机器人能执行具体的命令,信息就这样一层一层传导开。具体执行时,震动式马达通过抬起“腿”而完成移动。在以上三个小部件的共同作用下,当主控台让小机器人排成“K”或者是五角星的形状之后,历时12个小时的默默分工合作,机器人们完成排列。除此以外,Kilobots还能够对错误进行修正。如果出现了交通堵塞、或者是有机器人偏离轨道,邻近的机器人都能够检测到问题, 进行自我修正。
Kilobots具有诸多革命意义。首先它价格便宜。每只成本只不到15美元,和动辄造价上千上万的机器人比起来,实在是友好太多;第二是数量上的突破,如同军队管理一样,数量的增大带来的难度是呈指数上升的,实验人员曾说过,在经过长期的运算和实践后,才找到了构建大规模机器人集群临界点的算法和硬件;第三是它未来广泛的应用前景,这至少可以体现在两个方面:第一,虽然Kilobot现存的一个缺点是只能在平面上进行移动。但随着缺点的克服,它取代3D打印机的一天便也指日可待。未来可以通过Kilobots用三维的模式组装各种事物,比如建造真实的变形金刚以及构建出其他机器人。总之,电影中小宏展示时建造的房屋和道路,都可以完成。第二是在集体人工智能,这群机器人可用来研究群体行为,帮助人类更好地理解人类群体行为。

集群机器人的问题解决了,下面我们来谈谈神经传感控制。
这种以神经网络作为控制体,对其他物体进行控制的系统,作为人与机器连接方式之一,这么多年也一直在科学界被不断探索。
20世纪实验发现大脑能够产生有规律的电波,于是有了“脑机接口”方面的研究,科学家们试图通过脑电波来控制外部设备;2000年,美国杜克大学米格尔•尼克里斯(Miguel Nicolelis)通过在猴子的运动皮质中植入电极,并传输出其脑电信号至机械臂,实现了名叫贝尔的猴子对机械臂的控制;2008年,“艾朵雅(一只猴子)在一台跑步机上行走,同时把它的脑电信号通过互联网传送给远在日本东京的合作者。”,在运动信号传输给机器人之后,实现了美国的猴子和东京1.5米高的机器人的同步运动;2014年,美国哈佛医学院的神经科学家和神经外科医生齐夫•威廉姆斯(Ziv Williams)通过电脑分析大脑信号,并传输给另外一个生物体,实现了一只猴子对另一只猴子的“意念控制”。
猴子身上的多个实验都证明着,生物体的脑电波能够进行传输并实现对外部设备的控制;而在人类方面的发展和应用,则主要体现在义肢上。2014年3月,麻省理工学院教授Hugh Herr在TED演讲时,介绍了自己的生化义肢是如何与腿部相连而运作的:义肢中有电极能够测量肌肉的电脉冲,而生物腿被脊柱控制而形成运动的电流被记录到芯片中,因此义肢能根据肌肉的电脉冲而形成对应的反应,完成动作。现在的神经控制主要应用在医学上,但也不仅如此。2014年5月慕尼黑工业大学进行了名为 “brainflight”的项目研究,该项目希望通过大脑来控制飞行器以让更多的人能飞行,目前这个项目取得论坛巨大进展,帽子上的电极测量飞行员的脑电波,当飞行员有明确的控制命令脑电波,被脑机接口读出而发出命令。国内这方面也不断在发展,2013年5月清华大学洪波课题组在脑机接口临床方面取得进展,获取大脑皮层表面一个电极的神经信号,实现了思维打字的功能。
综上所述,神经控制与集群机器人都已问世,那么下一步,应该就是将二者结合,创造出颠覆行业的新技术了吧!
Kilobots具有诸多革命意义。首先它价格便宜。每只成本只不到15美元,和动辄造价上千上万的机器人比起来,实在是友好太多;第二是数量上的突破,如同军队管理一样,数量的增大带来的难度是呈指数上升的,实验人员曾说过,在经过长期的运算和实践后,才找到了构建大规模机器人集群临界点的算法和硬件;第三是它未来广泛的应用前景,这至少可以体现在两个方面:第一,虽然Kilobot现存的一个缺点是只能在平面上进行移动。但随着缺点的克服,它取代3D打印机的一天便也指日可待。未来可以通过Kilobots用三维的模式组装各种事物,比如建造真实的变形金刚以及构建出其他机器人。总之,电影中小宏展示时建造的房屋和道路,都可以完成。第二是在集体人工智能,这群机器人可用来研究群体行为,帮助人类更好地理解人类群体行为。
这种以神经网络作为控制体,对其他物体进行控制的系统,作为人与机器连接方式之一,这么多年也一直在科学界被不断探索。
20世纪实验发现大脑能够产生有规律的电波,于是有了“脑机接口”方面的研究,科学家们试图通过脑电波来控制外部设备;2000年,美国杜克大学米格尔•尼克里斯(Miguel Nicolelis)通过在猴子的运动皮质中植入电极,并传输出其脑电信号至机械臂,实现了名叫贝尔的猴子对机械臂的控制;2008年,“艾朵雅(一只猴子)在一台跑步机上行走,同时把它的脑电信号通过互联网传送给远在日本东京的合作者。”,在运动信号传输给机器人之后,实现了美国的猴子和东京1.5米高的机器人的同步运动;2014年,美国哈佛医学院的神经科学家和神经外科医生齐夫•威廉姆斯(Ziv Williams)通过电脑分析大脑信号,并传输给另外一个生物体,实现了一只猴子对另一只猴子的“意念控制”。
猴子身上的多个实验都证明着,生物体的脑电波能够进行传输并实现对外部设备的控制;而在人类方面的发展和应用,则主要体现在义肢上。2014年3月,麻省理工学院教授Hugh Herr在TED演讲时,介绍了自己的生化义肢是如何与腿部相连而运作的:义肢中有电极能够测量肌肉的电脉冲,而生物腿被脊柱控制而形成运动的电流被记录到芯片中,因此义肢能根据肌肉的电脉冲而形成对应的反应,完成动作。现在的神经控制主要应用在医学上,但也不仅如此。2014年5月慕尼黑工业大学进行了名为 “brainflight”的项目研究,该项目希望通过大脑来控制飞行器以让更多的人能飞行,目前这个项目取得论坛巨大进展,帽子上的电极测量飞行员的脑电波,当飞行员有明确的控制命令脑电波,被脑机接口读出而发出命令。国内这方面也不断在发展,2013年5月清华大学洪波课题组在脑机接口临床方面取得进展,获取大脑皮层表面一个电极的神经信号,实现了思维打字的功能。
综上所述,神经控制与集群机器人都已问世,那么下一步,应该就是将二者结合,创造出颠覆行业的新技术了吧!

